Performed testing and calibration of a magnetometer in order to dertermine correct heading and reduce measurement error.
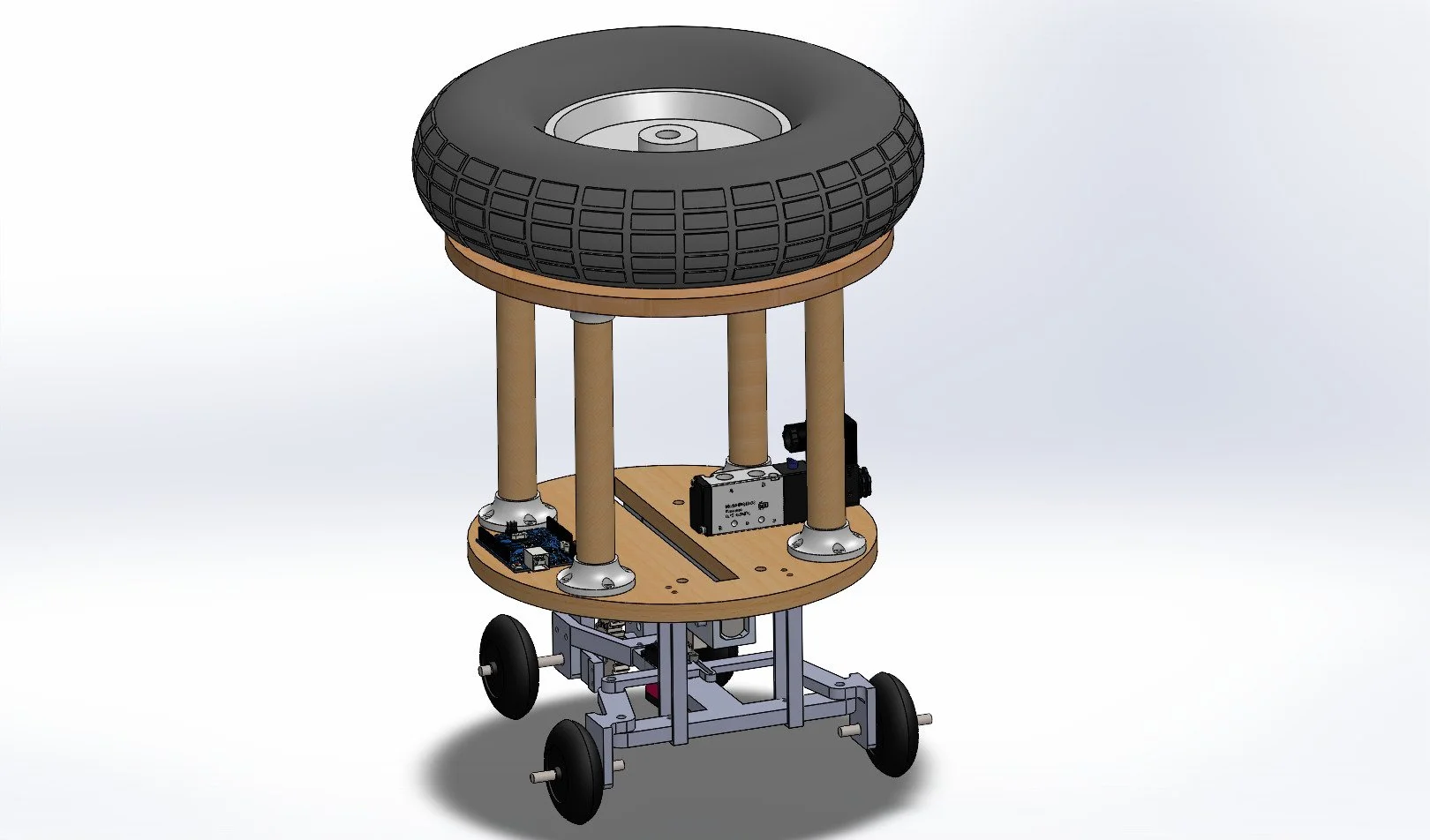
Pneumatic Robot
In a team of 4, created a robot capable of
navigating 6 feet wide canal 50ft in length while avoiding other robots and remaining in boundries.Team adhered to strict design requirements: 16” tall, 12” diameter
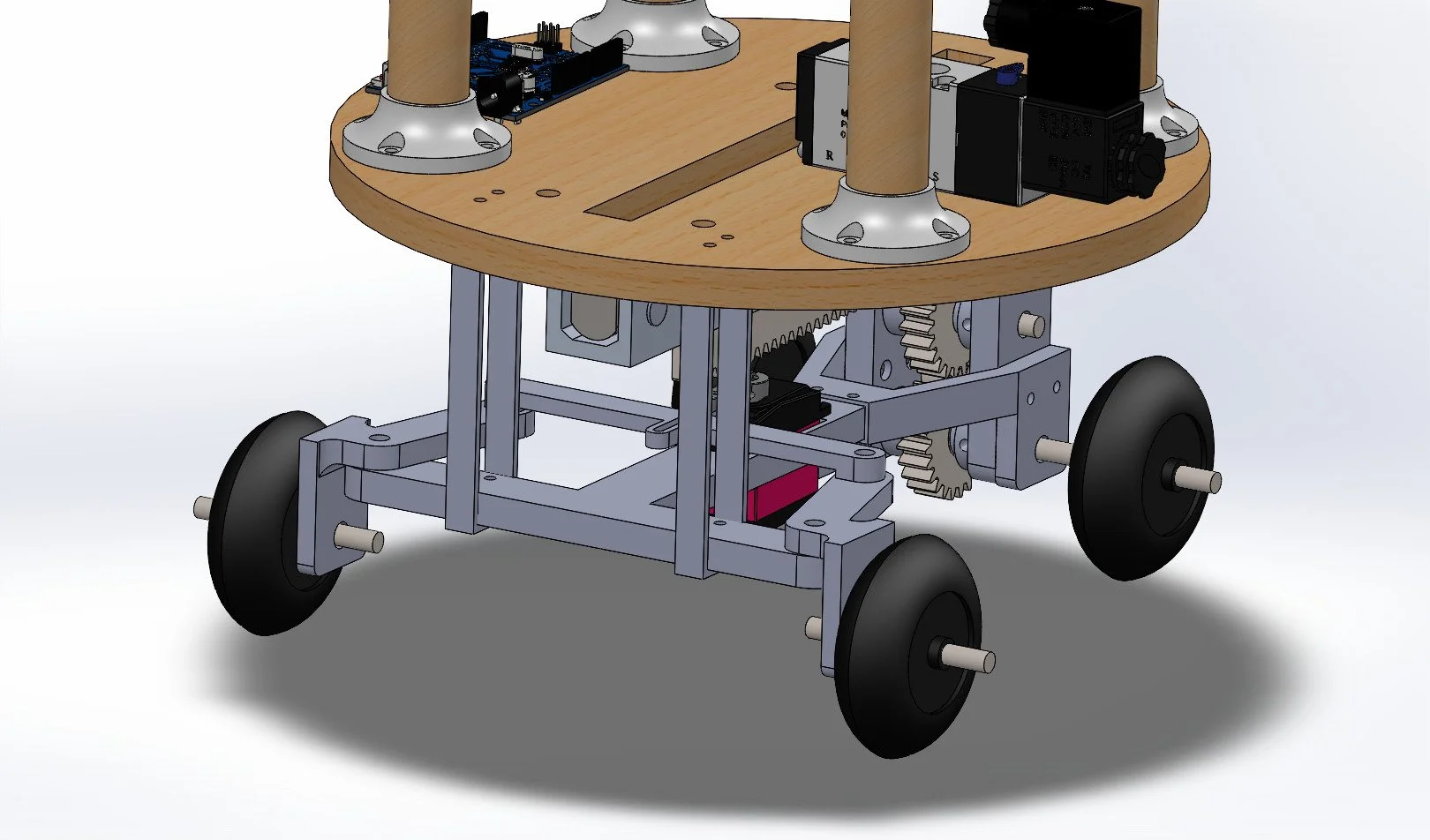
Designed and assembled a steering system in SolidWorks using Ackermann steering geometry and a rack-and-pinion mechanism for propulsion.
Utilized a 50KW Carbon Dioxide Laser to cut screw and mounting holes in plywood.
3D Printed mechanical parts using Polylactic Acid (PLA) and Acrylonitrile Butadiene Styrene (ABS)
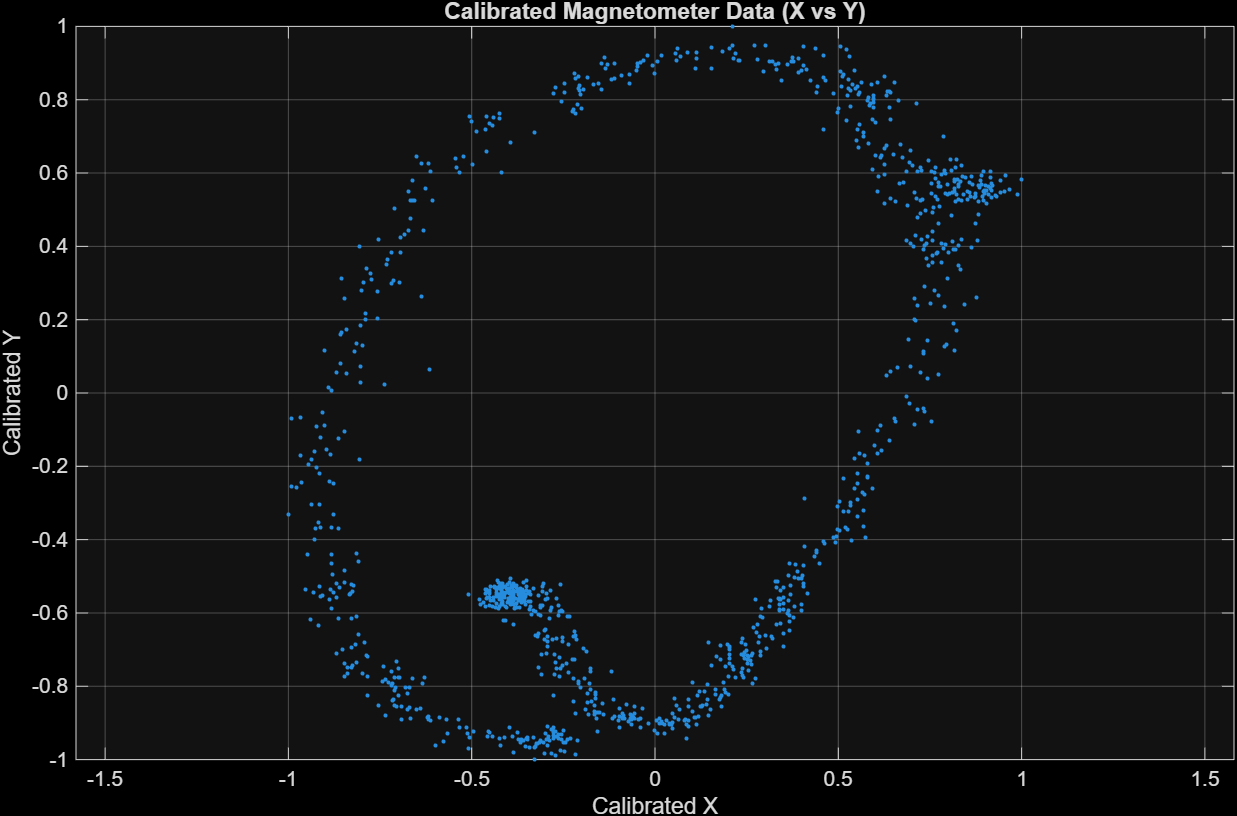
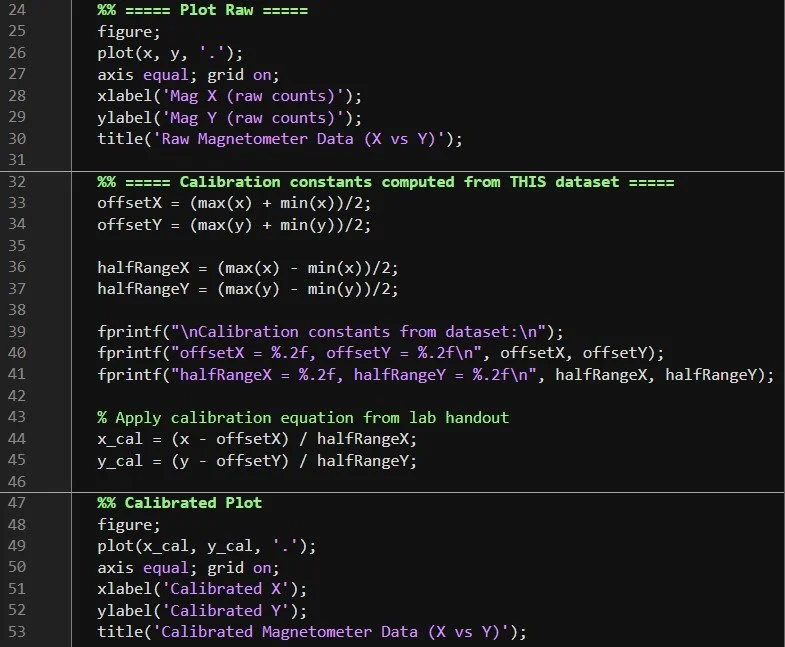
Created a script in MATLAB to interpret data from an Arduino Uno Microcontroller to process and analyze experimental data, and to generate plots to visualize patterns and trends.